

Here we will show some photos of what we did to change the default transmitter of quadcopter X350 PRO.
1. Extract the default receiver from the body.
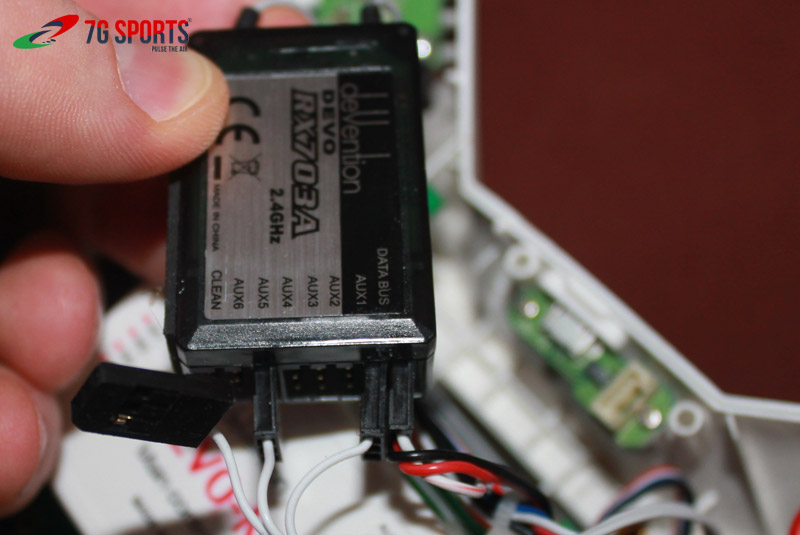

2. Insert the receiver Rx705 on the same place where the Rx703A was.

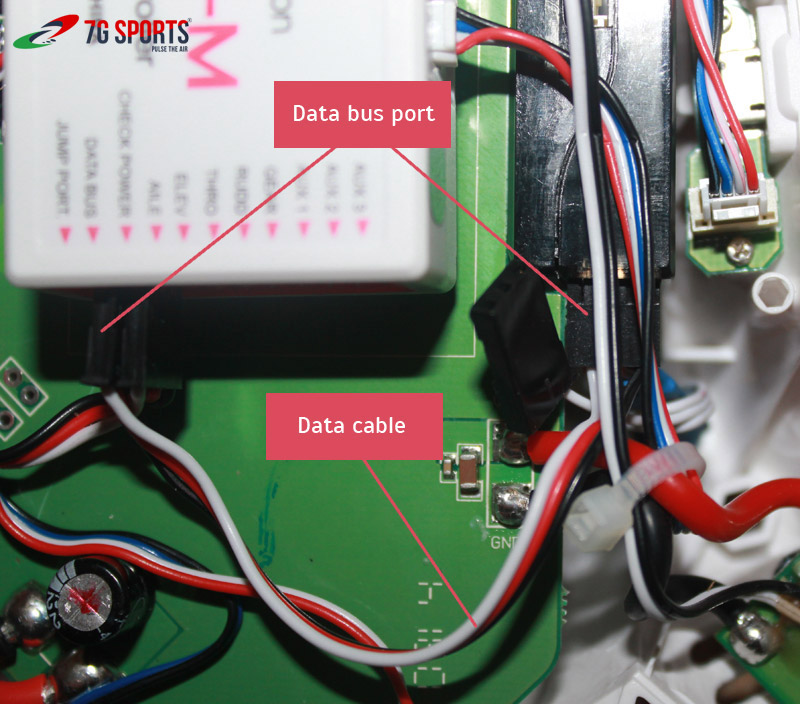
3. Connect the cables as it is shown below.
- Data cable to data bus;
- ROLL to AUX5;
- PITCH to AUX6;
- FP cable/Camera controller to AUX7.

4. Split the Cable coming out from the GPS module
For GPS module 580 - blue cable;
For GPS module 575 - white cable.

5. Insert the newly added cable to the TEL port of Rx705

6. Set the DEVO F12E as follows:
- Model menu > Type select, choose Airplane;
- Model menu > Wing type, set Wing Type to Normal;
- Model menu > Device output, set:
- Gear - MIX SW, Active;
- Flap - RUDD D/R, Active;
- AUX2 - ELEV D/R, Active;
- AUX3 - FMOD SW, Active;
- AUX4 - GEAR SW, Active;
- AUX5 - AUX5, Active;
- AUX6 - AUX6, Active;
- AUX7 - AILE D/R, Active.
- Function menu > Reverse switch - all values on the right should be set to Normal;
- Function menu > Servo travel adjust, set:
- Flap to U150.0%, D150%;
- AUX3 set to +5% (for flying in radius of 5 meters), -100% for the second value.
BONUS:
How to set the voltage alarm for the quadcopter battery:
- Model menu > Sensor setting, set Status to Active;
- Go down (DN button) and until Voltage is marked, click ENT;
- Go down (DN button) to External V1 and change the right value from Inhibit to Active (with using of the L button);
- Click DN once until the voltage value is marked;
- Set the value to 10.7V (with using of R/L buttons.
How to set up the watch to start automatically when you move the throttle up:
- Model menu > Stick position switch, set:
- Switch to SPPS0 SW;
- Channel - Throttle;
- Position - L94%;
- On - High
- Function menu > Timer, set:
- Type to Stopwatch;
- Switch - SPS0 SW.
We hope that the provided info is helpful for all of you.
Please leave a comment or share this article to your friends.

Jose Delgado
posted on 09 април 2015, четвъртък 02:49:12 Europe/Minsk